In May 2008 I made a successful concept demonstrator of a PIC18F2220 used to convert the output from a 2.4GHz AR7000 diversity receiver to the format expected by Wolferl standard flight software.
The problem with the AR7000 is that the servo signals are in the wrong order - the order also depends on the setting of the transmitter (aircraft or helicopter mode). I have only tested my system - it is possible that other AR7000/DX7 combinations give a different order!
The order of the signals from my AR7000 is:
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| roll | aux | sw | nick | camera | throttle | yaw |
The order expected by Wolferl is:
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| throttle | roll | nick | yaw | sw | camera | aux |
It does 3 things:
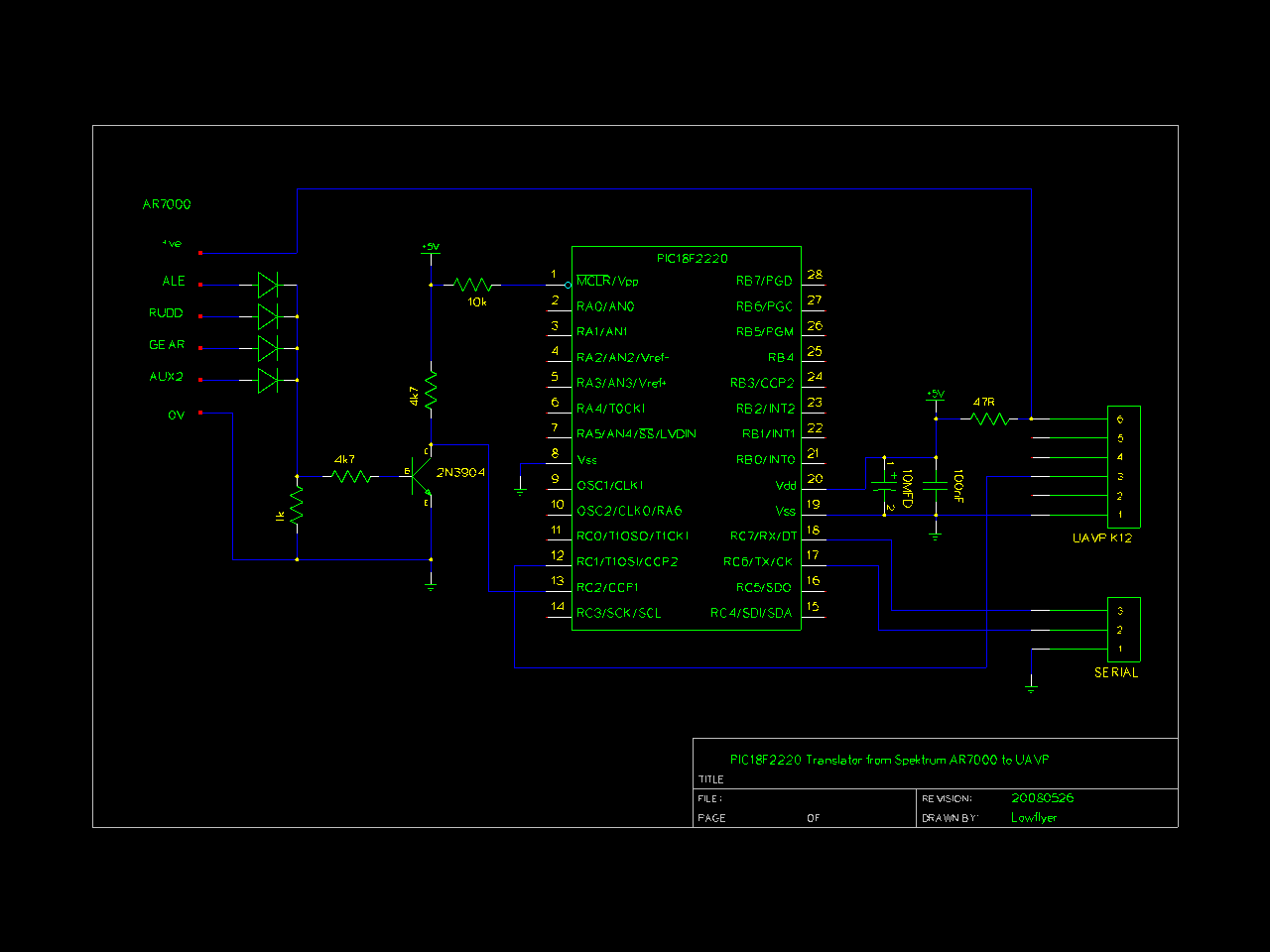
Here is the circuit diagram. I constructed it on a very small length of prototyping board with the diodes mounted on the AR7000. It is not very pretty but works fine and does not weigh very much. The assembler code is also not very pretty - borrowed from another project. It compiles on Linux using pikdev. Here is the the hex file.
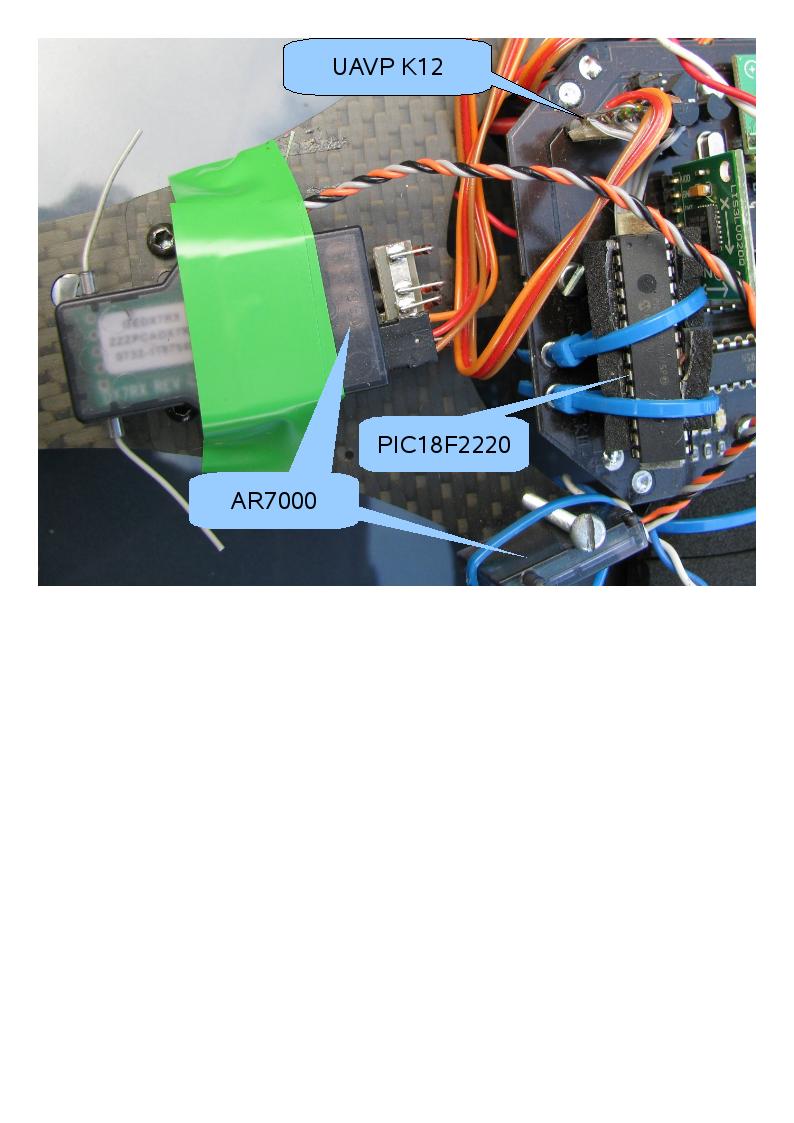
And this is what it looks like installed on my FC600.
I have not yet flashed this so I cannot say if it works, but I modified this irq.c from the released V314 source. It compiles and makes a hex file. Maybe it is useful to someone who is more familiar with C and with the Wolferl code. When V315 source is released I will try to get it flying :-). In fact there is a benefit in having a separate PIC - it can be used to experiment with other sensors (eg GPS, ultrasound or infra-red) without modifying the basic flight code.
My first movie. Taken on one of my first flights after getting a stable set of parameters using a FlyCamOne-V2 fixed directly to one arm of the UAVP.
2 stills taken using the FlyCamOne-V2 - still_1, still_2. No damping or stabilisation, so even at low resolution the vibration is visible.
If you are interested in the parameters I use you can download them below. My fore and aft rotors go counterclockwise.
{kind=link}
{kind=link}
{kind=link}
{kind=link}